Wrapped up an exciting week at L4DC 2025 where I had the opportunity to present both a talk and a poster on our latest work.
I have successfully passed my PhD proposal defense, advancing my research on machine learning-based and model-based vehicle dynamics and control.
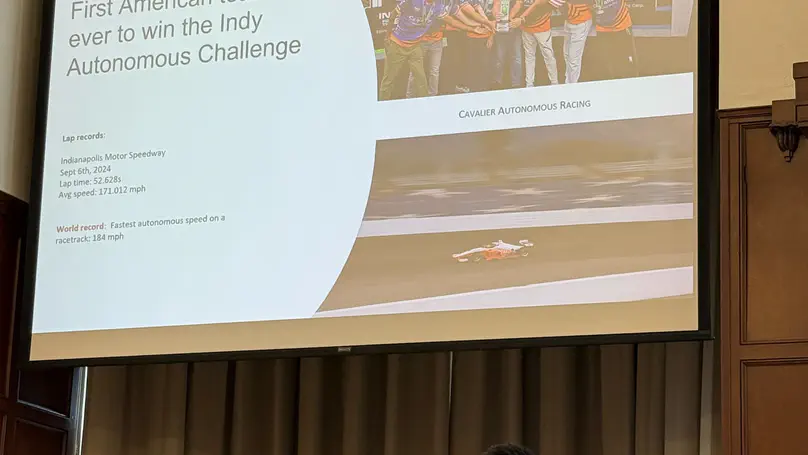
We set a new benchmark for autonomous racing performance and won the time trial competition at the seventh edition of IAC autonomous racing competition.
This summer, we have been preparing for the seventh edition of IAC autonomous racing competition.
The Cavalier Autonomous Racing team achieved 2nd place at the IAC CES 2024.
Demonstrate our work on DKL-SKIP for learning racecar dynamics at Conference on Robot Learning.
Testing our algorithm and racecar on the road course racetrack of Putnam Park, Indianapolis.
Demonstrate our work on real-time stormwater management using model predictive control at American Control Conference.