Deep Dynamics: Vehicle Dynamics Modeling With a Physics-Constrained Neural Network for Autonomous Racing
Abstract
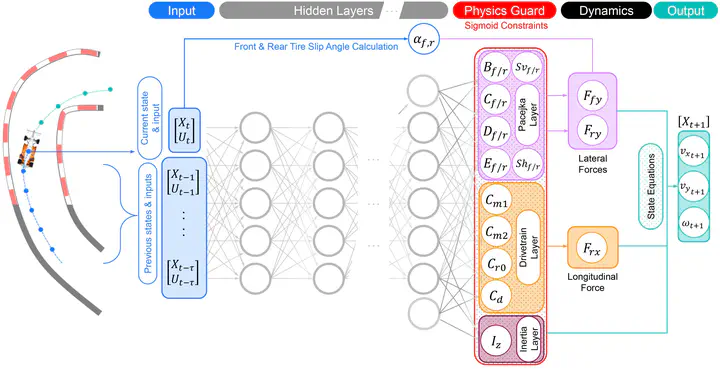
Autonomous racing is a critical research area for autonomous driving, presenting significant challenges in vehicle dynamics modeling, such as balancing model precision and computational efficiency at high speeds ( > 280 km/h), where minor errors in modeling have severe consequences. Existing physics-based models for vehicle dynamics require elaborate testing setups and tuning, which are hard to implement, time-intensive, and cost-prohibitive. Conversely, purely data-driven approaches do not generalize well and cannot adequately ensure physical constraints on predictions. This letter introduces Deep Dynamics, a physics-constrained neural network (PCNN) for autonomous racecar vehicle dynamics modeling. It merges physics coefficient estimation and dynamical equations to accurately predict vehicle states at high speeds. A unique Physics Guard layer ensures internal coefficient estimates remain within their nominal physical ranges. Open-loop and closed-loop performance assessments, using a physics-based simulator and full-scale autonomous Indy racecar data, highlight Deep Dynamics as a promising approach for modeling racecar vehicle dynamics.
Jingyun Ning
Vehicle Dynamics and Control Team Lead
My research interests include machine learning, dynamics modeling, learning-based control and optimal control strategies.